
新たな困りごとに地中レーダーが大活躍
空洞や埋設簡単さだけでなく、幅広い分野で地中レーダーの技術が利用されています。世界中の困りごとをケーススタディにまとめました。
解析困難な地下ユーティリティ調査(pulseEKKOシステム)
グリッドなしで深度スライスイメージを作成する(Noggin500MHz)
墓地の探査 - 間違いやすい解釈(Noggin500MHz)
含水率予測に地中レーダの電磁波伝播速度を利用する(pulseEKKOPRO1000MHz)
GPRを利用した洪水後の損傷査定
使用機器:LMX200
2017年春、カナダ ケベック州において未曽有の大雨により大規模な洪水が発生しました。モントリオールを流れる河川の堤防が決壊し、周辺地域一帯が浸水しました。その際ある地域の桟橋が2週間に渡って水深90cmの深さに完全に水没しました。洪水が引いた後、桟橋に崩壊箇所が確認されました。歩道上の連結レンガが崩れ、空洞が存在する場所が数箇所見つかりました。桟橋の壁を調査するといくつかの亀裂が見つかり、さらに付加的な構造基盤が流された危険性が浮上しました。地方自治体は、桟橋にはさらに未確認の空洞が存在するかもしれず、それにより桟橋が崩壊、歩行者が被害を受けることを懸念しました。そこで自治体はケベック州の物理探査業者に、桟橋を探査して危険箇所を報告することを依頼しました。

図1:桟橋表面のコンクリートと格子レンガが崩れ内部構造物と空洞が露呈

図2: LMX200を使用し未曽有の洪水により損傷を受けた桟橋を全長3.8kmに渡ってデータを収集
探査業者は当初、空洞探査に電磁誘導法を利用する計画でした。しかし桟橋には、ごみ箱やベンチなど電磁誘導探査の妨げになる金属性のものが多くあり、そのことが結果に悪い影響を及ぼすことが懸念されました。それを回避するため、金属性の物質による影響のない地中レーダを使用することにしました。多くの障害物に加え、桟橋の特殊な形状もあり、XYグリッド形式でのデータ収集はかなり難しいと予想されました(図3)。そこでGPSを併用してGPRデータの位置情報を取得しながらデータ収集を行う方法をとりました。この方法を利用すれば、グリッドを設定するよりはるかに迅速に桟橋のすべてのエリアを網羅することができます。データは、歩道上の印をもとに一律平均0.5m間隔になるよう設定された直線上で収集されました(図4)。この全長3.8kmのデータ収集は2名の技術者がわずか4時間で完了させました。
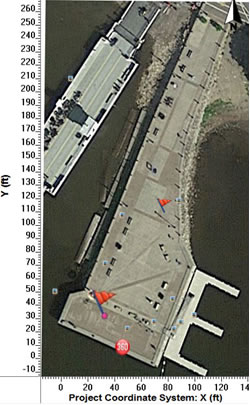 図3:上空から撮影した桟橋。障害物が多数確認できる。
図3:上空から撮影した桟橋。障害物が多数確認できる。
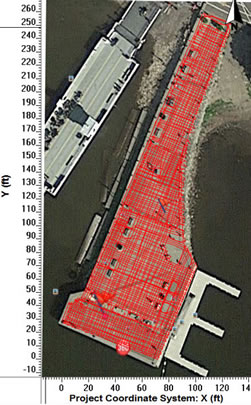
図4:データ収集測線。GPSの位置情報取得機能を利用することでグリッド設定よりも迅速にかつすべての探査範囲をスキャンできる。
データ収集完了後、EKKO_Projectプロセッシングソフトウェアのスライスビュー・ラインモジュールを使用して桟橋全体の深度スライスを作成しました。桟橋の下には桟橋の主要な構成要素として利用されている巨岩があり、その岩が洪水で流されることはないことはわかっていましたが、細かい砂と砂利で構成される浅瀬部分が流失したかもしれないという大きな不安がありました。深度スライスを確認すると、高振幅反応は空洞を示唆している可能性がありました。これは空洞内の空気または貯まった水が、上層の物質に対し大きな差異を示すため、強いGPR反射が構築されるためです。図5は深度約30cm付近の深度スライスで、赤と黄色は強い反射部分を、青と緑は弱い反射部分を示しています。図に示した3箇所はすでに表面が崩壊していました。
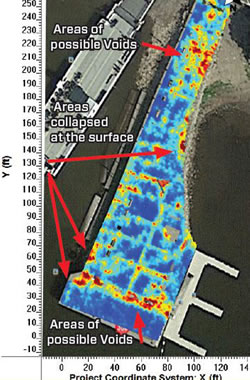
図5:深度約30cmの深度スライス。すでに崩壊しているエリアと空洞の可能性があるエリアに強いGPR反射が見られる(赤色と黄色のエリア)。
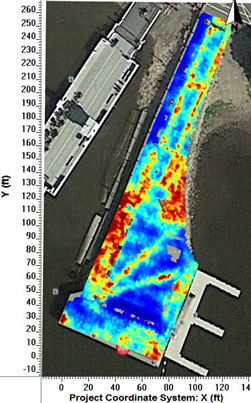 図6:深度約160cmの深度スライス。桟橋格子レンガ部分の下深い位置にある巨岩と玉石からの強い反射が見られる。この付近が地中レーダ電磁波の最深到達地点である。
図6:深度約160cmの深度スライス。桟橋格子レンガ部分の下深い位置にある巨岩と玉石からの強い反射が見られる。この付近が地中レーダ電磁波の最深到達地点である。
この調査中に観察された興味深いデータの様相があります。例えば、地中レーダから放射された電磁波は桟橋の格子状レンガ部分で最も深くまで到達しており、一方、表面がコンクリートの部分はそれよりかなり浅い部分までしか到達していませんでした。(図7断面図および図6 深度160cm付近の深度スライスの強反応部分(赤色)参照)
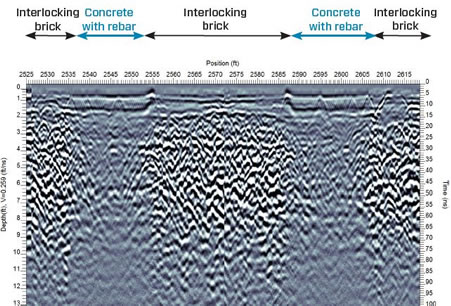
図7:桟橋を横断する特徴的なGPR測線。GPRの放射電磁波は表面が格子レンガか強化コンクリートかによって進入度が変わってくる。GPR電磁波は表面が格子レンガの場合より強くより深部まで進入するが、これはコンクリートに比べ導電率が低いためである。
これは驚くに当たることではなく、コンクリートは比較的高い導電率を有しており、そこで地中レーダの電磁波が減衰し、深部まで到達しないということが起こります。格子状レンガの下にある砂、砂利、玉石、岩石などははるかに低い導電率のため、レーダの電磁波は減衰することなく深部まで到達できるのです。桟橋全体のGPRスキャンをもとに、請負業者はただちに空洞が存在する可能性のある、強いGPR反応が見られた浅いエリアを特定し、自治体に報告書を提出しました。報告を受けて自治体は、桟橋の崩壊が懸念されるエリアの中から、表面から深度60cm以内に空洞の可能性が検出された場所に的を絞り、格子レンガを移動させ、浅い部分の空洞を埋める作業を行いました。さらに深い位置にある空洞に対処するために、桟橋の壁に確認された縦方向の亀裂にコンクリートを注入しました。地中レーダを使って調査することで、自治体は迅速にかつコスト効率よく、洪水によって受けた桟橋の内部損傷を査定し、利用者に被害が及ぶ前に的確な対処をすることができました。
解析困難な地下ユーティリティ調査
使用機器:pulseEKKOシステム
埋設ユーティリティの位置調査において、地中レーダはEM探査の補完手段となっています。 EM探査と異なり、個々のユーティリティが磁場を発生している場所について、地中レーダは周囲と異なる地中の特徴を可視化するもので、その結果多くのターゲットが発見されることがあります。この記事ではユーティリティ調査における、よくある、しかし解析困難な2つのケースのデータを用いて、取得したデータを最大限に生かす方法をご紹介します。
1. ターゲットが多い
地中におおくの埋設物が表示された場合、深度ごと、方向ごとで区別したり、岩や木の根などの他の対象物とユーティリティを区別するなどの方法で対処することができます。図1は多くのターゲットが複雑に現れている断面図の例です。
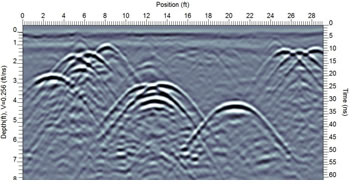
図1いくつものターゲットが多くの双曲線を作り出し解釈困難なデータとなっている。
2. 弱い反応
数種類の構成物で形成されるターゲット、深度によって異なる土質状態にある場合などは、地中レーダの反射振幅に非常に大きな影響を与えます。その結果、調査目標の埋設ユーティリティを示す反応が、断面イメージの中でもっとも際立っている強い反応とは限らないということが起きます。非金属のパイプや配管は弱い反応として現れることがあります。 これはそれらを構成する物質が周囲の土壌の性質に対してわずかな差しか示さないからです。図2のように目的の対象物からの反応が弱い場合、見落とされることが多々あります。このようなケース、あるいはこのようなケースがいくつも重なったケースでもデータを最大限に活用するための手法をいくつか見ていきましょう。
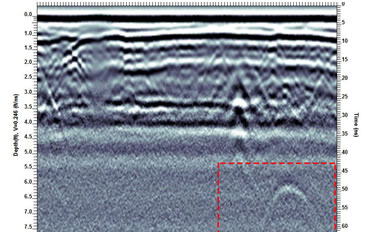
図2 強い反応だけに注目していると、深い場所に埋設されている
ユーティリティからの弱い反応(赤線の囲み部分)が見落とされがちになる。
3. 解釈とマップビュー
ユーティリティの位置調査の際、施工計画時の設計図等があればあらかじめその現場の状況を予測することができます。さらに通常、現場を撤収する前に、観察された特徴やターゲットのサイトマップを作成する必要があります。MapViewは実際の現場と同じ形状で探査データを表示することができます。このためには、データ収集の間、スクリーンをタッチしてカラードットをすべての反応(すべての双曲線)の頂上部分につけておきます(図3)。この最初の段階では、区別することなく、可能性のあるターゲットすべてにカラードットをマークします。この時注意すべきことは、データ収集の測線パターン、方向、間隔等がすべての探査エリアを正確にカバーできているかを確認することです。
データ収集中「MapView」を選択することで、探査エリア全体とそこに付与した全てのカラードットが画面上でいつでも確認できます。
埋設ユーティリティは通常長い線状の特徴を示すので、MapView画面で線状に並んだカラードットがあるか確認することは、探査エリアの土質による反応と、ユーティリティからの反応を区別する有効な手段です。図3では、もっとも深い反応にピンク、中間部分の反応にブルー、浅い部分の反応に黄色のドットをマークしました。これをMapView画面で見ると、ブルーとピンクは明らかな線状を形成し、これらが埋設ユーティリティであると推測できます(図4)。黄色の反応は単発的に現れています。
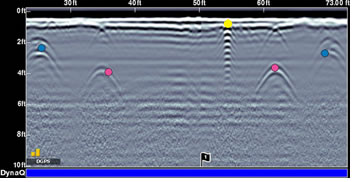 図3 データ収集中にスクリーン上にカラードットをマークする。
図3 データ収集中にスクリーン上にカラードットをマークする。
(ピンク-深い場所の反応、ブルー-中間の反応、黄色-浅い場所の反応)
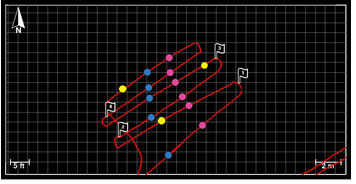
図4 MapView画面に表示された線状のユーティリティ(ブルーとピンク)と単発のターゲット(黄色)
4. 深度スライス
深度スライスはシグナル振幅に基づいて、あらゆる深度ごとのGPRデータを2Dでイメージ表示したものです。一か所に多くのユーティリティが埋設されている場合、深度スライスはユーティリティと思われる線状の物体を探すのに非常に有効な方法です。Sensors & Softwareの地中レーダシステムは、フィールドにいながら、設定、グリッドデータ収集、データ処理、深度スライス表示の操作を行えるようガイドしてくれます。(図5)もし、正確なGPS(誤差1m未満)を装備していて、空がよく見える開けた場所で探査をしているなら、GPSを利用してデータの位置を取得しながらラインスキャンを行い、深度スライスを作成することができます。グリッドを設定せずとも、探査エリアをジグザグに測線間隔を狭くして歩くだけでデータ収集ができます。収集データは最新のEKKO_Project V5PCソフトウェアSliceView-Line機能を使って、深度スライスに処理されます(図6)。深度スライスは解析困難なケース「1.ターゲットが多い」には非常に有効な方法です。ターゲットを可視化して、ユーティリティの様な線状の特徴を強調するのに大いに役立ちます。

図5 グリッドでデータ収集を行うことで深度スライスが構築でき、異なる深度でユーティリティを確認できる。
複雑な現場でのユーティリティマッピングに効果的。
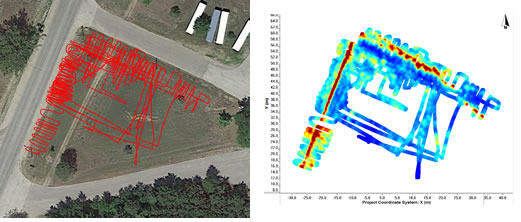
図6 位置情報に正確なGPSを使って疑似グリッドでデータを収集(左)。この方法でも異なる深度ごとにユーティリティを確認できる深度スライスを構築できる。
5. 深度スライスにカラードットを重ねる
深度スライスにはカラードットを付与したMapViewsのサポート的な使用法もあります。MapViewを使うことによって、深度スライスには現れてこない弱い反応も、オペレータが経験と知識によりカラードットを付与して選択・表示できます。深度スライスとMapViewを同時に利用することは複雑な反応を示す探査エリアでは極めて有効です。例えば、断面図上では目視で確認できるものでも、弱過ぎて深度スライスには表示されないものがあります(図8の赤のドット)。そういう弱い反応にカラードットを付与して、現場で直接またはEKKO_ProjectPCソフトを利用して表示させることが可能です。色で区別する方法は様々です。飲用水と思われる反応には青、というように地下のユーティリティ別にマークする方法や、浅い所の反応は緑、中間は赤、深い所は青、というように深度別にマークする方法などです。(図9)または、反応の強弱で区別する方法もあります。区別の方法はいくらでもありますが、プロジェクトに適した方法を選択し、効果がでるまでその方法を粘り強く続けることが必要です。
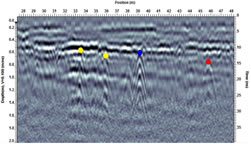
図7:GPRラインにカラードットを付与。 MapViewで表示させると線状になったユーティリティ が現れる。
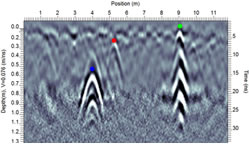
図8:特徴ある反応にカラードットを付与(グリーンドット)
カラードットをマークしたら、EKKO_ProjectPCソフトを利用してMapViewを表示させます。そしてそこに表示されたカラードットのパターンを見てみます。(図9と図10)カラードットが一列に並んでいる場所であれば、線状の物体、おそらくユーティリティがあることを示しています。バラバラに存在するカラードットは、単体で存在するターゲットからの反応であり、ユーティリティ調査を行う際はあまり注目されません。付与したカラードットと深度スライスを重ねてみることで、深度スライスに現れた強い線状の反応は、カラードットを付与した強い双曲線と同じものなのか確認することができます。(図9)そしてさらに重要なのは、深度スライスにははっきりと現れない弱い双曲線からユーティリティを検出することです。(図10)深度スライスとカラードットを併用する方法は、見逃されがちな弱い反応を検出し、複雑な探査現場を解決するのに非常に役立ちます。安全にそしてユーティリティを破損しないことが第一条件です。難解なユーティリティ調査に直面した時には、出せる戦略をすべて使ってそれを解決していくことです。

図9:深度スライスにユーティリティのはっきりした線状反応が見られ(上)、
カラードットを付与することで再確認できた(下)。

図10:深度スライス上にははっきりした線状反応は見られない(上)。
しかし、非常に弱い反応を含むすべての双曲線をカラードットでマークすると、
通常では見落とされがちなユーティリティが検出された(下)。
グレイトシナゴーグの発掘
使用機器:pulseEKKOシステム
60年前に破壊されたヴィルナ(リトアニアの都市)にある偉大なシナゴーグとShulhoyfを、世界各国の科学者チームがpulaseEKKOを使用して、その貴重な歴史を解明しようとしています。

ヴィルナ(ヴィルニアス)は1500年代中ごろ、文化的、科学的な中継都市として重要な役割を担っていたと認識されている都市です。 17世紀の終わりまで、ヴィルニアスは信仰の異なる数多くの教会が林立する、ヨーロッパでも他に類をみない貴重な都市でした。そのひとつがヴィルナのグレイトシナゴーグです。長い期間をかけてグレイトシナゴーグの周辺には他の建物が立ち並び、やがて12の教会と共用施設が複雑に立ち並ぶShulhoyfのような迷宮を構成するに至りました。第二次大戦でヨーロッパが壊滅したように、グレイトシナゴーグも金品を略奪され焼かれ、廃墟のまま放置され、かつての栄光を失いました。1957年、ソビエト連邦、そしてリトアニアの管理下、並木道の確保のため構造物は解体され、数年後にはそこに小学校が建てられました。研究者たちは、グレイトシナゴーグが倒壊した構造のほとんどが敷地内に残された状態で自壊していると考えていました。2015年、イスラエルの考古学博士ジョン・セリグマン率いる各国の科学者チームは、ヴィルナのグレイトシナゴーグを調査、発掘し、その遺構を保存する任務を委託されました。いくつかの予備発掘調査の後、地中レーダを調査に使用することになりました。地中レーダは非破壊で調査エリアをスキャンして、建物の中で無傷で残っている可能性が高い箇所をより経済的に特定できる方法です。ウィスコンシンーオークレア大学地球物理学・人類学教授ハリー・ジョル博士が、その豊富な経験から、地中レーダ探査のリーダーを務められました。

図1 かつてのグレイトシナゴーグ建設地・現小学校校庭での pulseEKKOシステムを用いた探査
第1回目の調査は2015年夏にpulseEKKO地中レーダシステムを使用して行われました。(図1) 測線間隔0.25mで6グリッド、合計1,600平方メートルが調査されました。(図2)
225MHzアンテナを使用し地下深度3m以上までを調査した結果、素晴らしい断面イメージが得られ(図3)、無傷で残る複雑な遺構の位置を確認することができました。
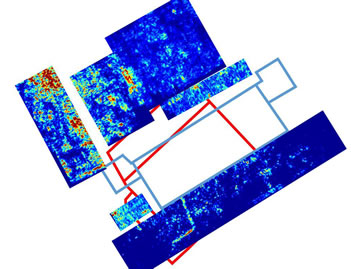
図2 現小学校およびグレイトシナゴーグのアウトラインとグリッドとの重ね合わせ
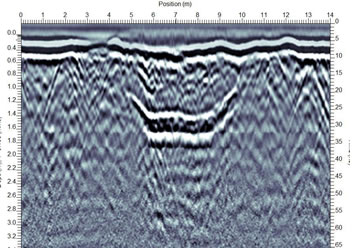
図3 地下の遺構を示す断面イメージ
考古学に関するGPRデータで、深度スライスイメージ上に明瞭な円、四角形、線などがある場合は、それらが人工的なものであるという強いサインになります。
また同時に断面イメージを確認することも重要です。なぜなら遺構の床や壁といったものの特徴がより鮮明に現れるからです。 (図4)
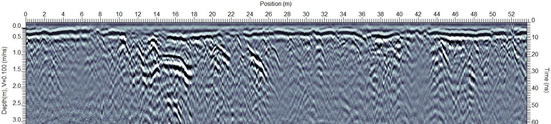
図4 遺構の壁と床と思われる部分の断面イメージ

図5 GPR探査の結果、遺構の存在が確実なエリアは2016年発掘が行われ多くの部屋が発掘された。
2016年、pulseEKKO地中レーダ探査結果に基づいて発掘が行われました。この発掘で、GPR探査の正確性が認められました。表土を撤去すると、すぐにいくつもの部屋の壁の上部が見え始めました。詳しい解析の結果、これらの壁はシナゴーグの中でも複雑な作りの浴室のものと断定されました。(図5)この探査の成功をうけて、2016年夏、さらに2グリッドの探査が行われました。2017年の夏には発掘も予定されています。pulseEKKO地中レーダシステムは、深い深度まで探査が可能であり、また遺跡、空洞、墓あるいは埋没した古代の道路などの可視化に優れているため、考古学の専門家の方々に好まれています。ヴィルナのグレイトシナゴーグでは、建物は崩壊してしまいましたが、消失してしまったわけではなく、ヴィルニアスの貴重な文化遺産として存在し続けるのです。
グリッドなしで深度スライスイメージを作成する
使用機器:Noggin500MHzアンテナ スマートカートシステム
多くのGPRユーザーにとってグリッドを設置する作業はあまり気の進むものではないようです。時間もかかるし、簡単ではないからです。Sensors & Software では、20年以上に渡ってグリッドを利用したデータ収集をおすすめしてきました。探査エリアを正確に測定したデータが得られ、結果としてより正確な地下のイメージが得られ、それゆえ解析もよりしやすくなるからです。GPRデータのほとんどは、深度スライスか3Dボクセル立方体での表示形式になります。しかし多くのユーザーにとって、グリッドを設置して、それに沿ってデータを収集するという作業は、気が進まないものです。グリッドが有効な理由として、探査エリアをすべて網羅することができ、データの正確な位置情報が得られ、すべてのトレースに一定の方向性をもたせて、空間的でシステマチックなデータ処理ができることがあげられます。グリッドを使用することで、整然としたデータを収集することができ、正確な深度スライスや3Dキューブを表示させることができます。
しかし他にももっと簡単に、データを収集し、すべてのトレースの位置情報を把握できる方法はないものでしょうか?答えはYesです。位置情報を把握するための技術は、レーザーセオドライトやIMU(慣性計測装置)などたくさんありますが、一番よく知られているのはGPSでしょう。GPSは世界中どこでも手に入り、Sensors & Softwareの地中レーダ探査システムにも簡単に接続できます。しかし、地中レーダ探査に用いるGPSは、車やスマートフォンについているGPSよりもより正確なものでなくてはなりません。もちろんそうなると価格も高くなります。
もっとも正確なGPSはRTK (リアルタイムキネマチック)GPSです。これは、2つのGPSを使う方法です。一つはレーダーシステムと一緒に移動し、もう一つは固定した位置に置き、移動しているGPSと通信しながら、より高精度な位置情報を獲得するもので、移動用GPS単独で行うよりもずっと正確です。ほとんどの場合、誤差は0.5m以下です。しかしRTK GPSが必ずしも必要というわけではありません。手ごろな価格のディファレンシャルGPS(DGPS)でも、スムーズアルゴリズムやWAAS (Wide Area Aumentation System) のような衛星ベースの位置修正機能を内蔵しており、これにより差異を減らし、GPS(米国)とGLONASS(ロシア)の両方の衛星測位システムにアクセスします。このようなGPSは、深度スライスを構築するために必要な正確な位置情報を提供してくれます。実際、図3のデータはそのようなGPS(TopconSGR-1)を使って収集したものです。
GPSを併用してGPRデータを収集するときは、グリッドを設定する必要はありません。芝刈り機で芝を刈るのと同じ要領で、探査エリアを一定のパターンで歩き回ればいいのです。ただし、探査エリアが全てカバーされている必要があります。位置情報はGPSに任せる一方で、探査すべきエリアのデータが全て収集されているかに集中しなくてはなりません。
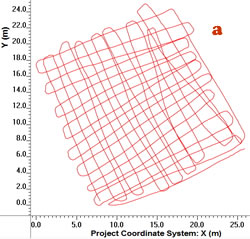
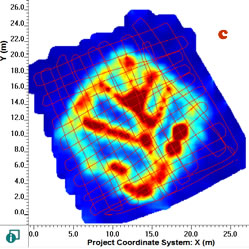
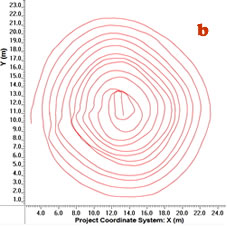
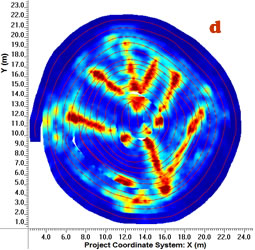
図1:縦横方向ライン(a)とその深度スライス(c)、 らせん状ライン(b)とその深度スライス(d)
EKKO ProjectV5ソフトウェアのスライスビューモジュールに新機能が追加されました。収集したラインデータに位置情報を付加させて深度スライスを作成する機能です。
例えば、2つのシングルラインデータを2通りの方法でゴルフ場で収集しました(図1)。Line1は縦横方向に往復するやり方で(図1a)、Line2は中心からスタートしてらせん状に外に向かって進むやり方(図1b)です。
グリッドデータのスライスビューと同様、GPSを利用したラインデータのスライスビューも、深度スライス作成前に、図2が示すいくつかのパラメーターを設定する必要があります。(図2)
Advancedを選択すると、ユーザーは値を入力することができます。この画面ではほとんどのパラメーターはデフォルトになっていますが、深度スライスビューに重要なパラメーターとして、探査エリアでのGPR速度があります。
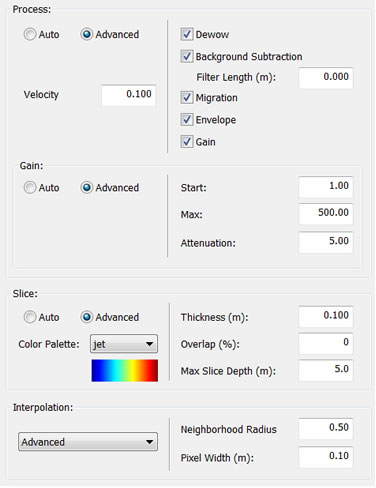
図2:GPSベース深度スライスパラメーター
もし可能なら、hyperbola-fitting機能を使い、GPR速度を指定することが望まれます。Migrationの過程で、”Velocity”の項目にその値を入力します。もしできなければデフォルトの0.10m/nsを使います。
もう一つ、深度スライスビューに重要な設定値に、”Interpolation distance”があります。通常この値は、探査エリアにおける隣り合う探査ライン間隔の平均値が設定されます。グリッドを利用したデータ収集と同様、この隣り合う探査ライン間隔が狭くなればなるほど、最終的なイメージ図はより正確なものとなります。図1のライン間隔平均値は約1mです。図1のそれぞれの探査ラインにより得られた深度スライスイメージは、それぞれその下の図1cと1dになります。このイメージ図で樹木状にあらわれているのがゴルフ場グリーンの地下にある排水管です。
GPSを併用してデータを収集する方法は、グリッドを設置するのが苦手なユーザーの皆様に好評です。RTK GPSやレーザーセオドライトのような、正確な位置情報を得られる製品でも、近年では価格が安くなっています。グリッドを使用しない探査も増えていくと思われます。GPRでのデータ収集が簡単になるということは、ユーザーにとってはフィールドに費やす時間が短くなるということであり、非破壊探査がより手頃な価格で行え、より多くのチャレンジが容易になるということです。それにより図3にあるような探査も増えてくると予測しています。
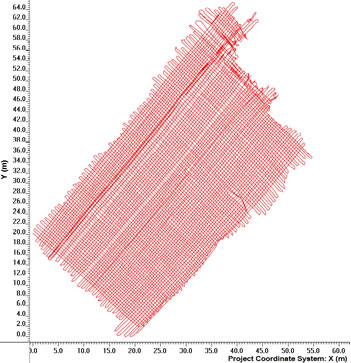
図3a:30x60m GPSによるグリッドなしの探査
(ライン長7,000m,所要時間5時間)
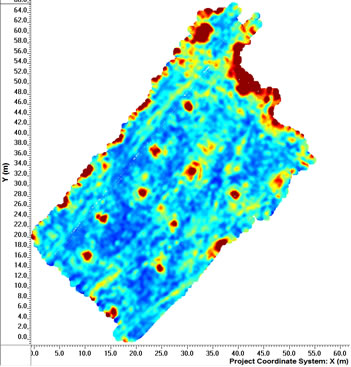
図3:上図aのラインの深度スライスパターン1
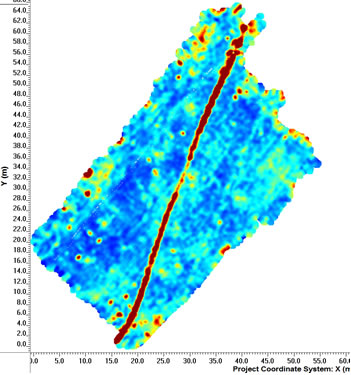
図3:上図aのラインの深度スライスパターン2
コンクリート路盤下の空洞調査
使用機器:Noggin500MHzアンテナ スマートカートシステム
テキサス州のある製油所では、地質の問題上、地下に空洞ができやすいというリスクがありました。既存の施設への追加工事で、クレーンなどの重機が敷地内を走行するに当たって陥没事故の危険性が懸念されていたため、GPRを使って事前に地盤の状態を確認しました。GPRは地表付近の地下に何があるのか(この事例の場合、何が「ない」のか!)を調査できます。ここでは工事を安全に行うためにGPRを使用した例をご紹介します。

世界には、その土地の地質が建造物に甚大な被害をもたらす地域が多くあります。地盤の隆起や沈下により、その上にある建造物は破損することもあります。アメリカの湾岸部にもそのような地域があり、地盤が著しく沈下する傾向にあります。これに対応するため、通常はコンクリート杭を基盤岩まで打ち込み、建物に対する支持力を十分なものにします。
この地域にある製油所で既存の施設への追加工事が予定され、クレーンなどの重機を搬入する必要があり、これら重機の荷重にコンクリート路盤が耐えられるかどうかを事前に確認することになりました。GPRはコンクリート構造物下の空洞調査に大変適した方法です。調査時において、路面上にはクラックなどの変状は見られませんでしたが、製油所側は重機を搬入しても大丈夫という確信が得たかったのです。
調査はNoggin500スマートカートを使用して、9か所のエリアで実施されました。図1にはあるエリアの代表的な地中レーダプロファイルを示します。深度約20cm付近には通常のコンクリート路盤内の鉄筋の反応が見られていますが、その直下にも高振幅の異常反射が検出されています。
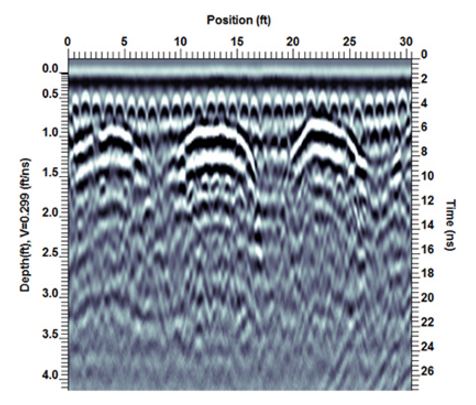
図 1:断面図 深度約20cm付近に通常鉄筋構造にみられる反応が確認できる。
深度30cm付近に不可解な高振幅の反射が見られる。
図2は深度約20cm付近のスライスで、コンクリート路盤内の鉄筋がはっきりと確認できます。
図3は深度約30cm付近のスライスで、規則的な高振幅パターンが見られます(赤で示された部分)。 当初の解析では、高振幅エリアはおそらく支持杭であり、低振幅エリアは土壌の部分であろうと見られていました。
これらの解析が正しいか見極める方法は、実際に掘削を行い地下の状況を確認するしかありません。掘削してみると、コンクリート路盤の下に空洞が発見されましたが、その箇所は当初、支持杭からの反応と考えていた高振幅エリアと一致しました。この反応はまさに空洞の存在を示していたのです。
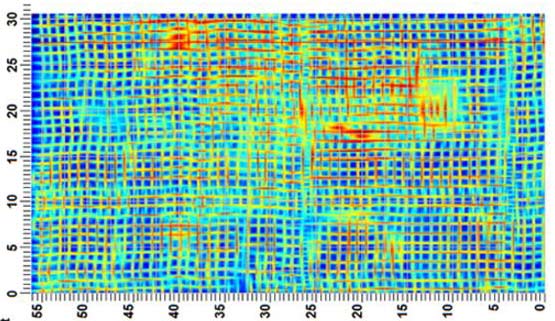 図 2
図 2
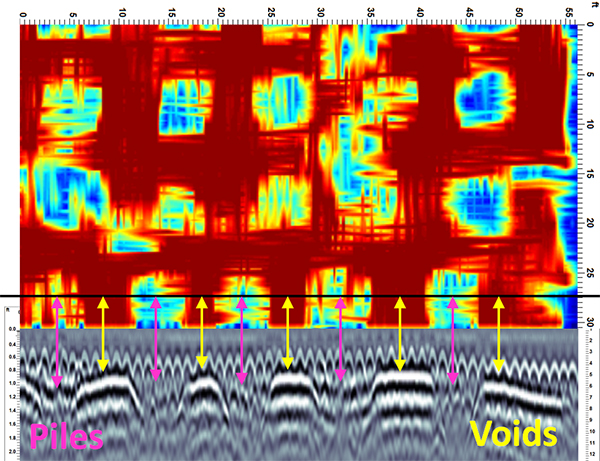
図 3:深度30cm付近のスライスビュー(上図)と断面図(下図)。
断面図の高振幅反射は深度スライスの赤いエリアと一致している。
低振幅のエリアはコンクリート路盤とからコンクリート杭の境界の反応でした。この調査から、すべての構造物は杭によって完璧に支えられていたが、杭がない部分については、コンクリート路盤下の地盤はすべて沈下していたことが判明しました。空洞は深さ45cmほどであることが確認され、直ちに補強処理が行われました。その後予定通り追加工事が開始され、重機が安全に搬入されました。この事例は、地表からは地下の状態が把握できないことを示しています。実際に探査前のコンクリート路盤には何の変状も認められませんでした。しかし、もしGPR探査で地下の状態を確認する作業をせずに重機を搬入していたら、安定性に関して深刻な問題が起こっていたことでしょう。
コンクリートと空気の電気的性質は大きく異なっており(比誘電率は9から1へ変化する)、空洞はGPRデータ上では強い反射としてあらわれます。コンクリート杭とコンクリート路盤には性質の違いはほとんど無いため、コンクリート杭と路盤が接触している場所では、反射は弱いか、境界面として検出されない状態となります。GPRは空洞調査に大変適した、安全・迅速に行えるで効果的な方法であり、この他にも滑走路調査や道路のメンテナンスなど様々な用途で威力を発揮します。
墓地の探査-間違いやすい解釈
使用機器:Noggin500MHzアンテナ スマートカートシステム
地中レーダは、棺のような非金属の物質も探知可能なため、墓地の探査にもよく利用されます。また、棺はなく墓穴のみでも、掘削時の地盤の乱れを捉えることで検出できます。しかしながら、他の多くの探査でも同じ事が言えますが、データを解釈する上で偏見を持たないことが重要です。これは実際の結果が予測していたものと異なる可能性があるということです。

Noggin500を使用して、南アフリカ、プレトリアにある墓標のない墓地を探査しました。図1は断面図の一つです。同様な深度に等間隔で双曲線の反応が見られます。通常、これらの双曲線が墓穴をあらわしていると解釈されます。しかし、深度スライスで見てみると、予期しなかった興味深いパターンが現れ、これにより当初の解釈を変えることになりました。
20×10mの範囲で、長さ20m、0.5m間隔で平行に21測線のデータを取得しました。
よく見てみると、断面図に見られる双曲線の反応は、深度スライス中の墓穴の反応と一致していないことがわかります。
実際には、双曲線部分は墓穴と墓穴の「間部分」からの強い反応で、深度スライス中の墓穴とみられる場所は弱い(低振幅の)反応としてあらわれています。
 図1
図1
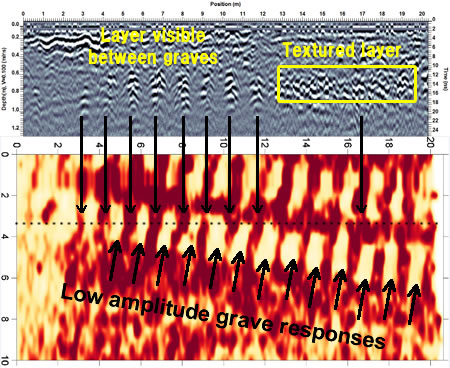 図2
図2
図2は3.5mの測線のもので、この付近にはいくつもの墓穴が並んでいます。断面図を見ると、深度0.7m付近に強い反応を示す箇所があります。墓穴と墓穴の間部分と思われるこの箇所は、当初墓穴部分からの反応と考えられていたものです。一方、双曲線がテクスチャー状になっている箇所は、多数の双曲線状の反射が重なり合ってできたものです(図2黄色の囲い部分)。境界は、上部の物質との接触部分がギザギザ状になり非常に凸凹に富んだ形状を示します。図2で確認されたテクスチャー状の箇所は、おそらく、粗粒土と岩塊から構成されており、それぞれからの反応がこのような反射パターン(形状)を示したと考えられます。墓穴はこれらの反射が確認されない箇所にあると考えられます。なぜなら、これらの層は穴を掘る際、除去されたと思われるからです。このケースでは、地中レーダにより直接墓穴の場所が確認されたわけではなく、明瞭な反射のない部分に墓穴が存在するということが判明したことになります。ただし、掘り返すわけにはいかないので実地検証はできていません。
この事例は、いきなりデータの解釈に入る前に、まずはグリッドのデータと深度スライスを全体で見て総合的に判断する必要があることの重要さを示すよい例です。また、解析者は考えを柔軟にして、当初の見解をくつがえすような証拠が現れた時には、仮説を変更する心構えが必要です。これは一流のGPR解析者になるために必要な技術です。
含水率予測に地下レーダーの電磁波伝播速度を利用する
使用機器:pulseEKKOPRO 1000MHzアンテナ
地中レーダの電磁波の速度は直接的にも間接的にも利用価値があります。速度を利用して、データ中の対象物の深度を算出するのはよく知られた方法です。あまり知られていない使い方の一つに、調査対象物の含水率を測定するというものがあります。これは農業・木材の分野や検層のような調査には非常に有効です。原理的には、ある供試体のGPR速度を測定する方法は比較的シンプルです。
まず、供試体の底面には、供試体とまったく異なる電気特性を持った物質を設置します。特に金属板などが効果的です。また、GPRのアンテナと供試体の相性が良い場合、境界が明確に確認できます。送信電波が供試体の底面から反射して戻ってくるまでの時間(t)と、送・受信機の間隔(s)、真空中の光の速度(c)、そして供試体の深度(d)を図1の式に当てはめて速度を算出します。この際、信頼できる結果を導き出すには、多くのことを考慮しなければなりません。まず、計測された電磁波反射時間(t)が正確な速度を算出できるよう、また、サンプルのサイズが電磁波反射時間に影響を及ぼさないよう、サンプルは十分な大きさがなければなりません。
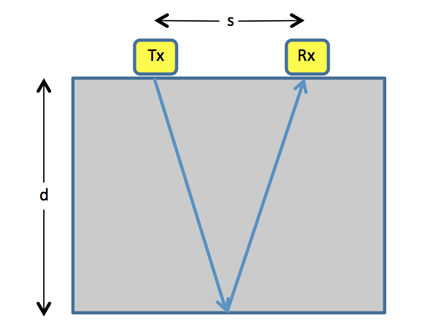
 図1
図1
通常、サンプルの表面がアンテナの間隔の2倍以上ある場合、電磁波反射時間に及ぼす影響は小さくなります。反射の振幅はサンプルサイズによる影響がさらに大きくなります。また、ノイズもしくは低い振幅のせいでサンプル底面からの反射が見分けが難しくなります。
次の例は反射波をより明確に見分ける簡単な方法です。pulseEKKOPRO TR1000を使用し、ウッドチップを使ってデータの収集を行いました(図2)。一つはプラスチックコンテナの底に金属板を入れ、もう一つは何もいれずに(空気)行いました。
 図2
図2
図3の左のグラフを見ると、両方のケースにおけるサンプルの底面からの反射を確認できますが、これだけで正確な電磁波反射時間を特定するのは困難です。右のグラフは二つのトレースの差を示していますが、これを見ると反射波の動きが明確になります。 この方法は、欲しい反射を見分けるのに工夫をこらして、より正確な到達時間を導き出し、結果としてより正確な伝播速度を算出することができるものです。
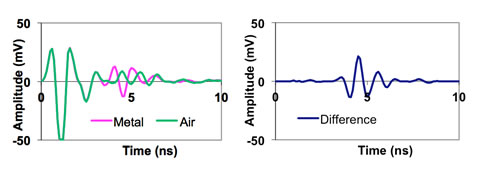 図3
図3
電磁波伝播速度を測定することで、供試体の要素、例えば含水率を推測することができます。この場合、他の方法で正確な含水量を測ったうえで(例えば、サンプルを湿らせた時の重さと乾かした後の重さを計るなど)、サンプルの電磁波伝播速度を測定する必要があります。その上で、電磁波伝播速度と含水率の相関関係を明確にしていくのです。
比誘電率は電磁波速度によってもとめられます。Kr=(c/v)2 この時cは光の速度をあらわします。土に関しては、Toppらの得た相関式が含水量を推測するのによく使われます。図4は、ウッドチップの重量を測定することで得られた含水量と、GPR測定による電磁波反射時間から導かれた比誘電率との関係を示したグラフです。
図4
このように、地下レーダーから得られる電磁波伝播速度は、物質の要素を簡便にかつ非破壊にて把握することができます。
深度スライスの有効性
使用機器:Conquest
コンクリート構造物に地中レーダを使用する目的は切ったり、穴を開けたりする前に、内部の構造を把握することにあります。事前に内部構造を把握することで、構造物の損傷を防ぎ、安全性が向上します。そして、 いかにしてコスト効率よく正確な内部情報を得るかが重要になります。Conquestにはこの内部構造を知るための二通りの方法があります。ラインスキャンとグリッドスキャンです。シングルラインスキャンは基本的にコンクリート内部の断面図が得られます(ラインスキャン)。内部構造が単純な場合にはこの方法は有効です。複雑なコンクリート構造物は内部構造を把握するのが非常に難しいことが多く、グリッドを設定してデータを収集し、3Dで把握することが必要になってきます。(グリッドスキャン)
コストは現場に費やす時間が大きく関わってきます。ラインスキャンはあまり時間がかからないため費用も安くてすみます。グリッドスキャンはそれよりも少し時間はかかりますが、より総合的な把握が可能です。コスト的には安くすんでも、対象物の構造を間違って把握することは危険です。そのせいで構造物を破損させて修理費用が発生したり、ケガにつながったり、信用を落としたりすることになりかねません。
先日オンタリオのリッチモンドヒルでConquestの講習会を行いました。工業用倉庫内のコンクリート部分をスキャンしました。ここではラインスキャンとグリッドスキャンを行いました。
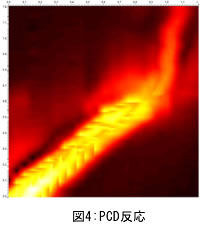
図1のシングルラインスキャンでは、右側にPCD(パワーケーブルディテクター)反応とともに異常な鉄筋の状態が示されています。PCD反応はそこに電流が流れている電線が埋設されていることを示唆しています。シングルラインスキャンでは問題の可能性のある範囲はわかりますが、そこを切ったり穴を開けたりする場合に損傷させるリスクを回避するにはどうしたらよいかまでは解決できません。
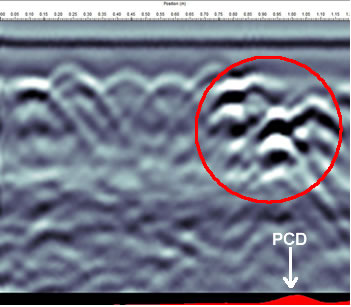 図1 ラインスキャン 異常反応(赤丸)とPCD反応
図1 ラインスキャン 異常反応(赤丸)とPCD反応
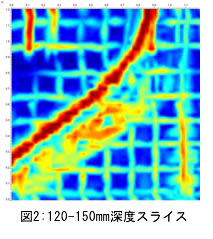
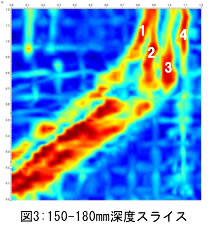
グリッドスキャンを行って、いくつかの深度で図2と図3にあるような深度スライスを作成します。スライス画像を見ると、通常の鉄筋構造の中にはっきりと斜めに走る何かがあることがわかります。これは電線管であると推測できます(電線管は通常、鉄筋構造の中での異常な反応として現れます)。図3には1~4の4本の電線管が見えます。1の電線管は他の3本よりも浅い場所にあります。1,2,3の管は鉄筋に対して45度の角度で走って、右上部でそれぞれが平行になるように曲がっています。4の管は右側の上から下へ走っていますが、鉄筋とは平行していません。図4はPCD反応のスライス画像です。強い反応を示している部分は2と3の管と関連しており、電線がそこにあることがわかります。
このことから、シングルラインスキャンと比べ、詳細な情報が豊富に得られるグリッドスキャンは、より総合的なアプローチができます。かかる時間の差も10分程度です。リスクを回避するためなら、この程度の時間は全く問題にならないでしょう。
多くのユーザーとの対話からもわかったことですが、お客様に高価値のものをお届けするためには、わずか数分余計に時間をかけてグリッドスキャンを行い、深度スライスを作成することは大いに価値のあることです。
25年以上コンクリート内部探査を行ってきましたが、リスク回避のためにも、グリッドスキャンを行うことを強くおすすめします。そしてラインスキャンは最適なグリッドスキャンを行うための予備調査として使われるとよいでしょう。